PIR Camera Trigger
This post has been moved to our new site at www.photobuilds.com: it can be found here.
For now the photos have been retained so you can see if the end product is of interest, but the full post can be found by following the link above.

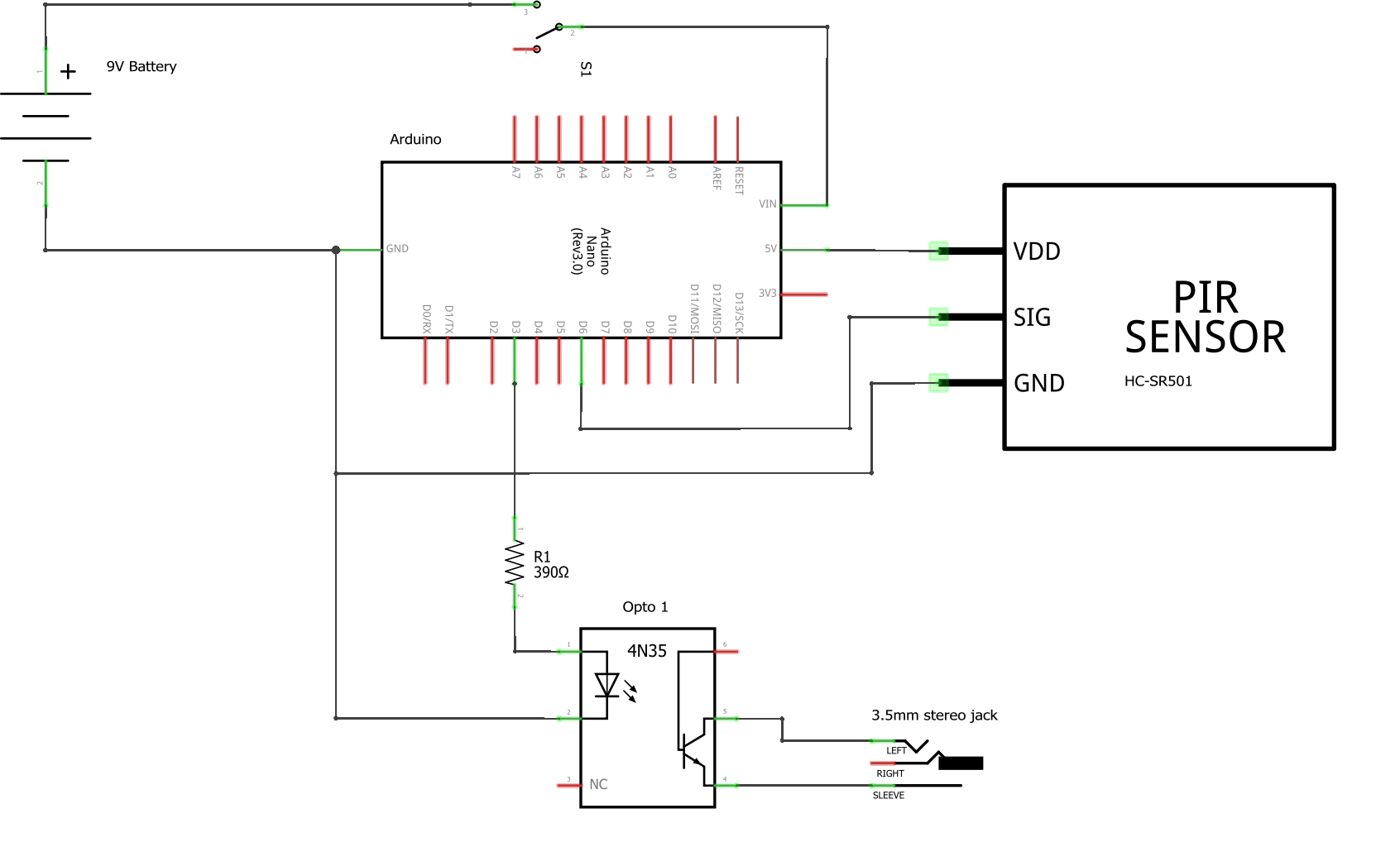
And the associated circuit diagram is shown below:



1 Response
[…] code for this project is slightly different to the PIR Camera Trigger and Drop Controller projects as it uses interrupts for both the rotary encoder and catching the […]